|
|
     aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 전기이다: 배터리 없음
- 전원: 전기
- 테마: 동물 및 자연,수송,판타지&SF,직업,스포츠,음악
- 모델 번호: IMU
- 추천 나이: 14 + y
- 원산지: 중국
- Brand: Hiwonder
저렴한 IMU 관성 항법 모듈 ROS1/ROS2 로봇 MEMS USB 자력계 10 축 ARHS 자세 센서
제품 설명
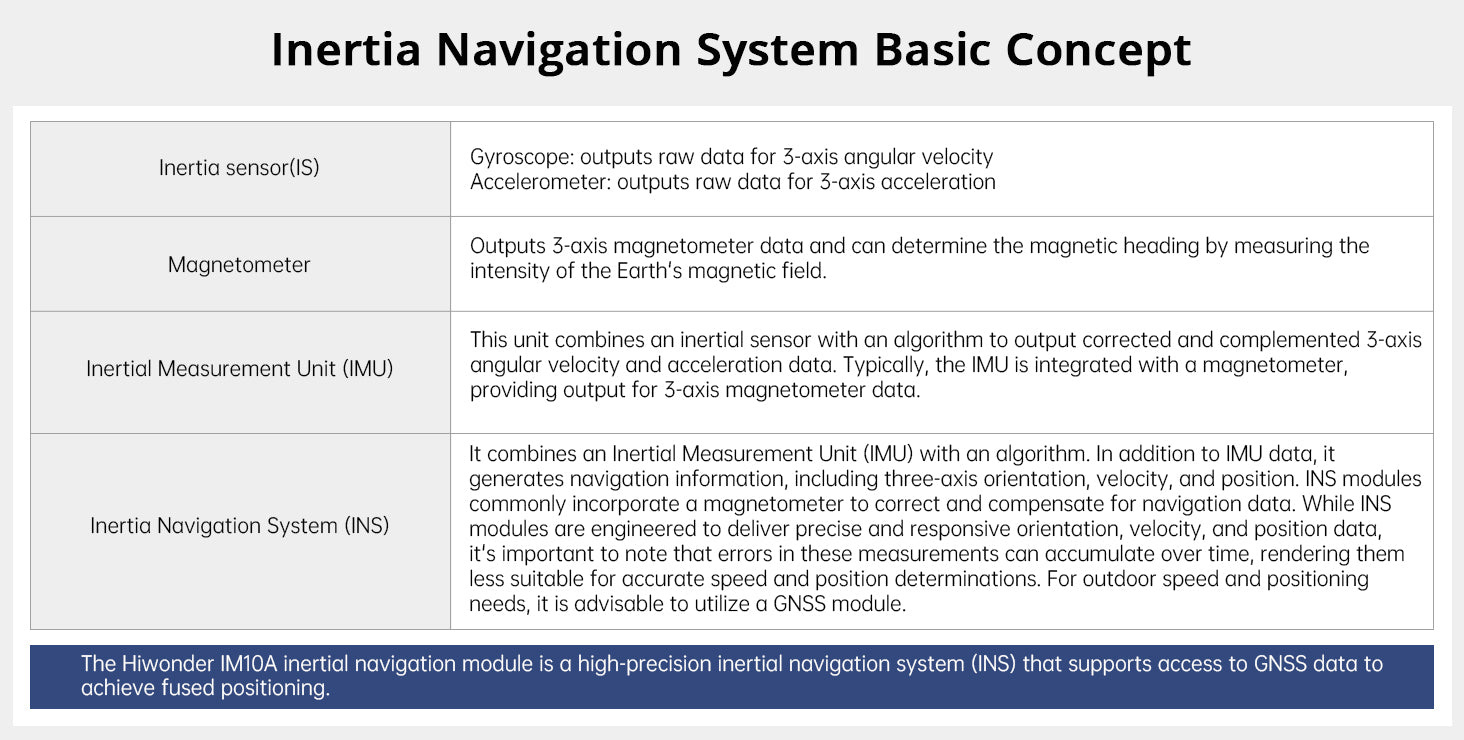
IM10A 관성 항법 모듈은 첨단 3 차원 동작 및 자세 측정 시스템입니다
MEMS 기술 활용. 그것은 3 축 자이로 스코프, 3 축 가속도계, 3 축 자력계, 기압계로 구성됩니다.
통합 자세 역학 코어 알고리즘 엔진과 정교한 Kalman 필터 융합 알고리즘을 갖춘 IM10A 는 매우 정확하고 역동적이며 실시간으로 보정 된 3 축 자세 각도 데이터를 제공합니다.
이 모듈은 최대 200 Hz의 업데이트 속도로 실시간 데이터 전송을 지원하며 융합 포지셔닝을 위한 GNSS 데이터와 호환됩니다. 우리는 사용자에게 PC 소프트웨어, 운영 지침, 개발 매뉴얼 및 필요한 개발 코드를 제공하여 다양한 요구 사항을 가진 사용자를 위해 연구 개발 프로세스를 간소화합니다.
 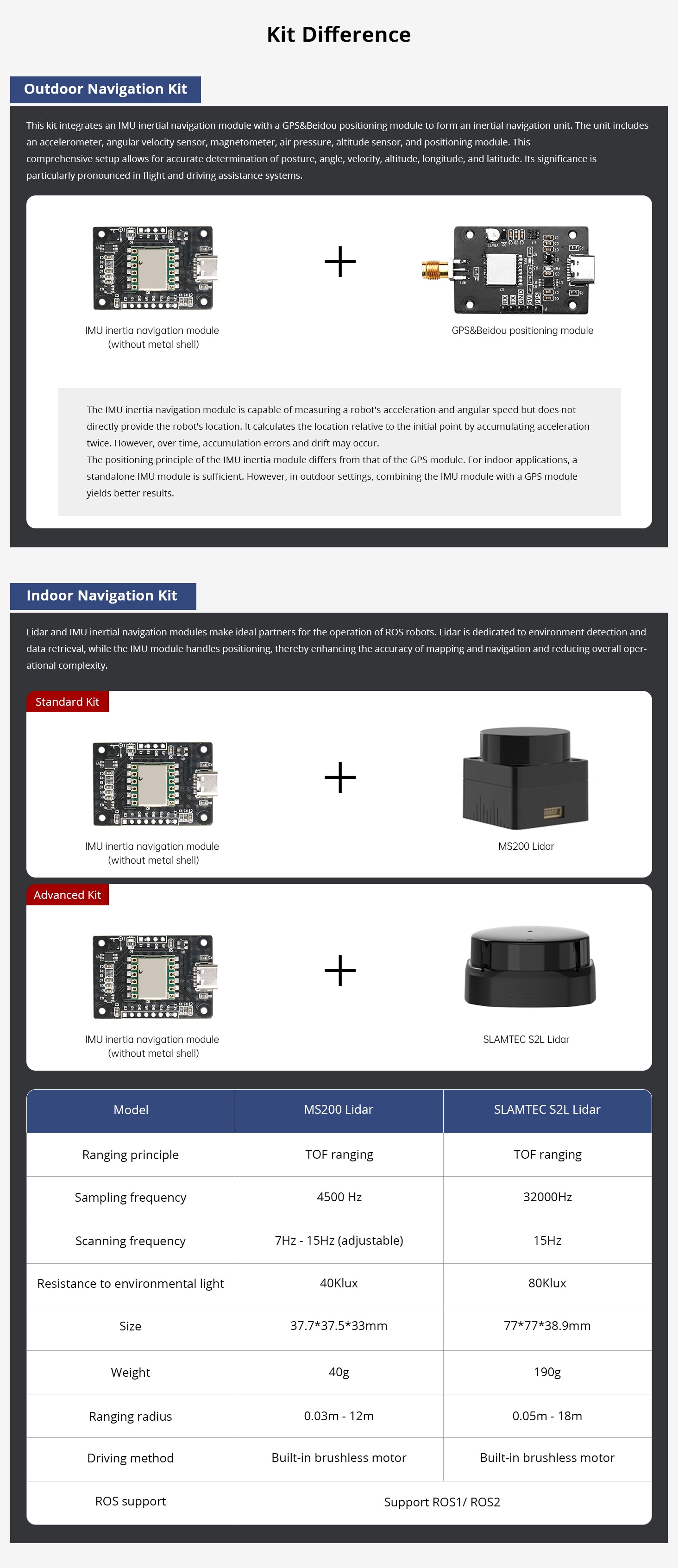
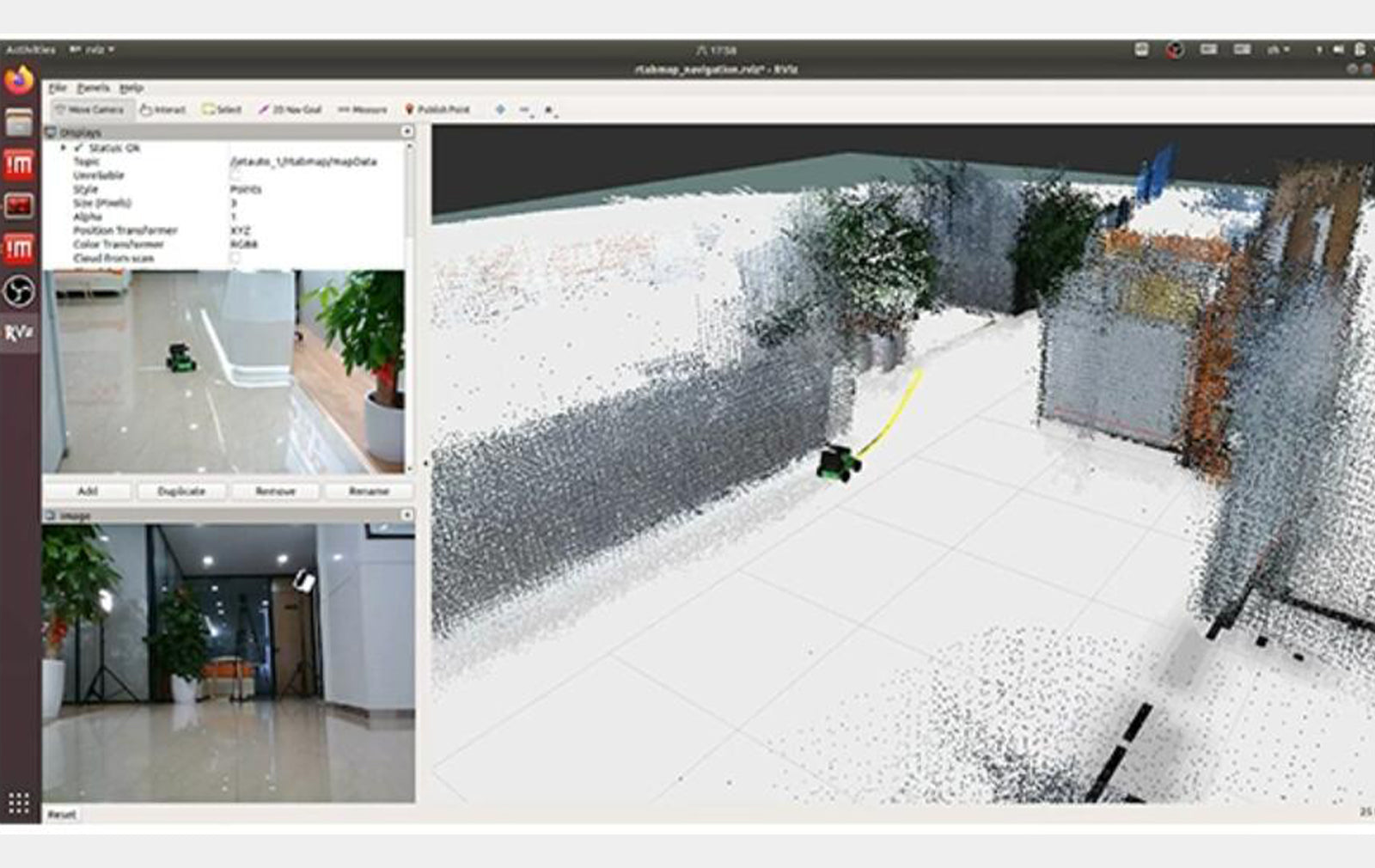
IM10A 모듈은 ROS1 을 지원합니다.
및 ROS2 시스템이며 데이터 출력 주파수는 최대 200 Hz입니다. 우리는
원활한 이중 시스템 기능 패키지 및 사용 자습서 제공
사용자가 빨리 시작할 수 있습니다.
IM10A 관성 내비게이션
모듈에는 3 축 자이로 스코프, 3 축 가속도계,
3 축 자력계 및 기압계.
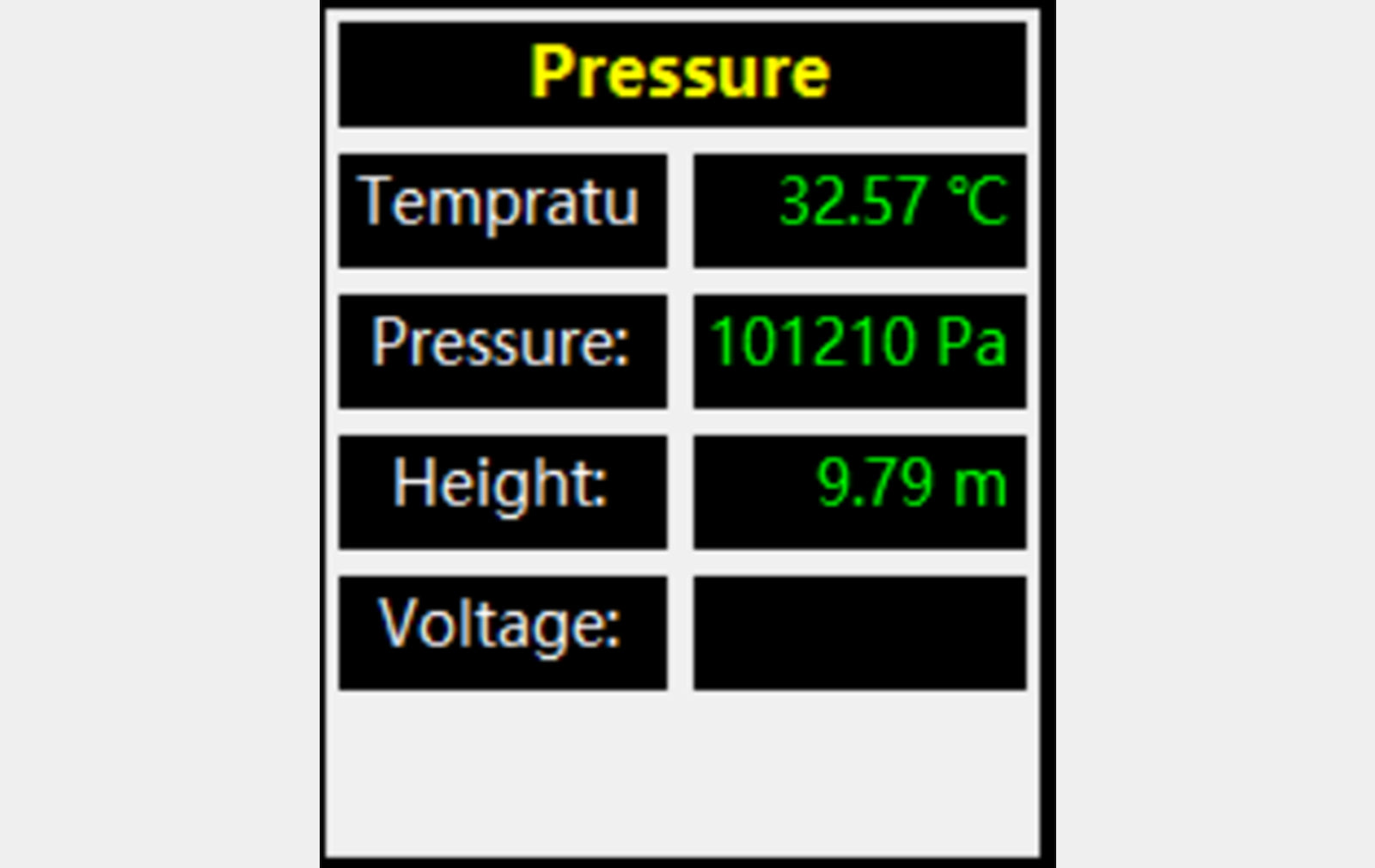
IM10A 모듈에는 현재 고도를 측정 할 수있는 기압계가 내장되어 있으며 네비게이션 데이터를 통합하고 계산하여 기압 데이터를 출력 할 수 있습니다.
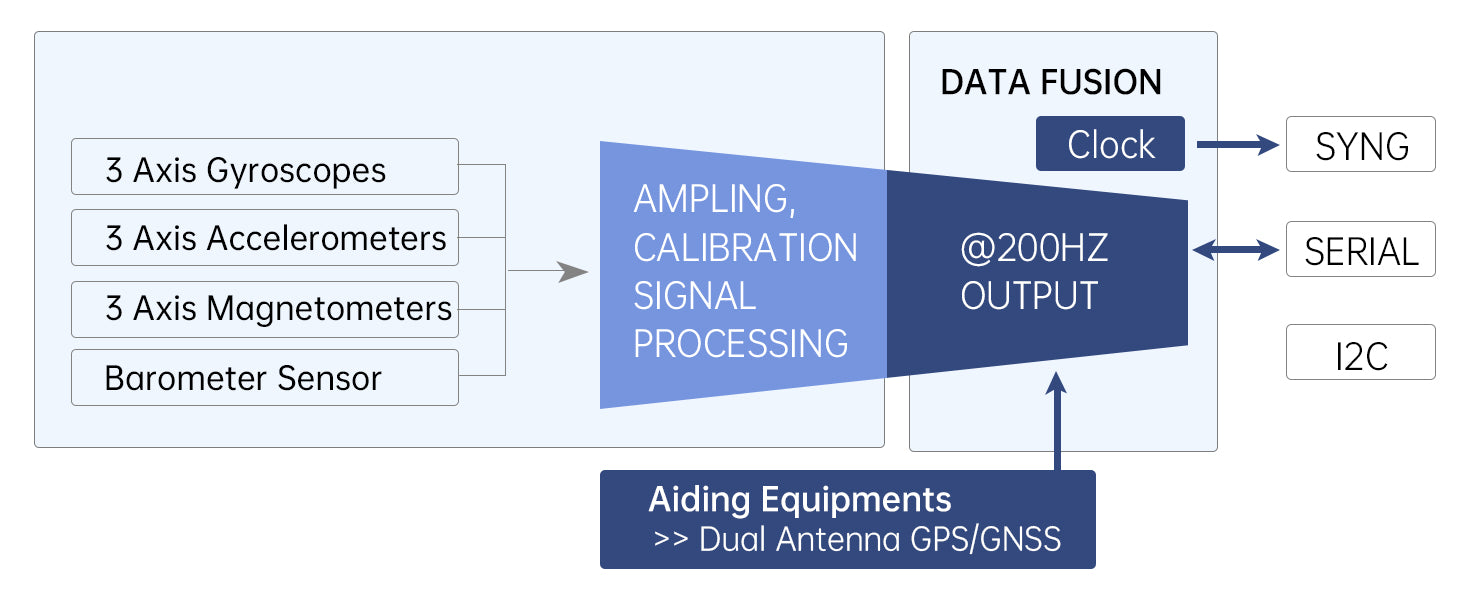
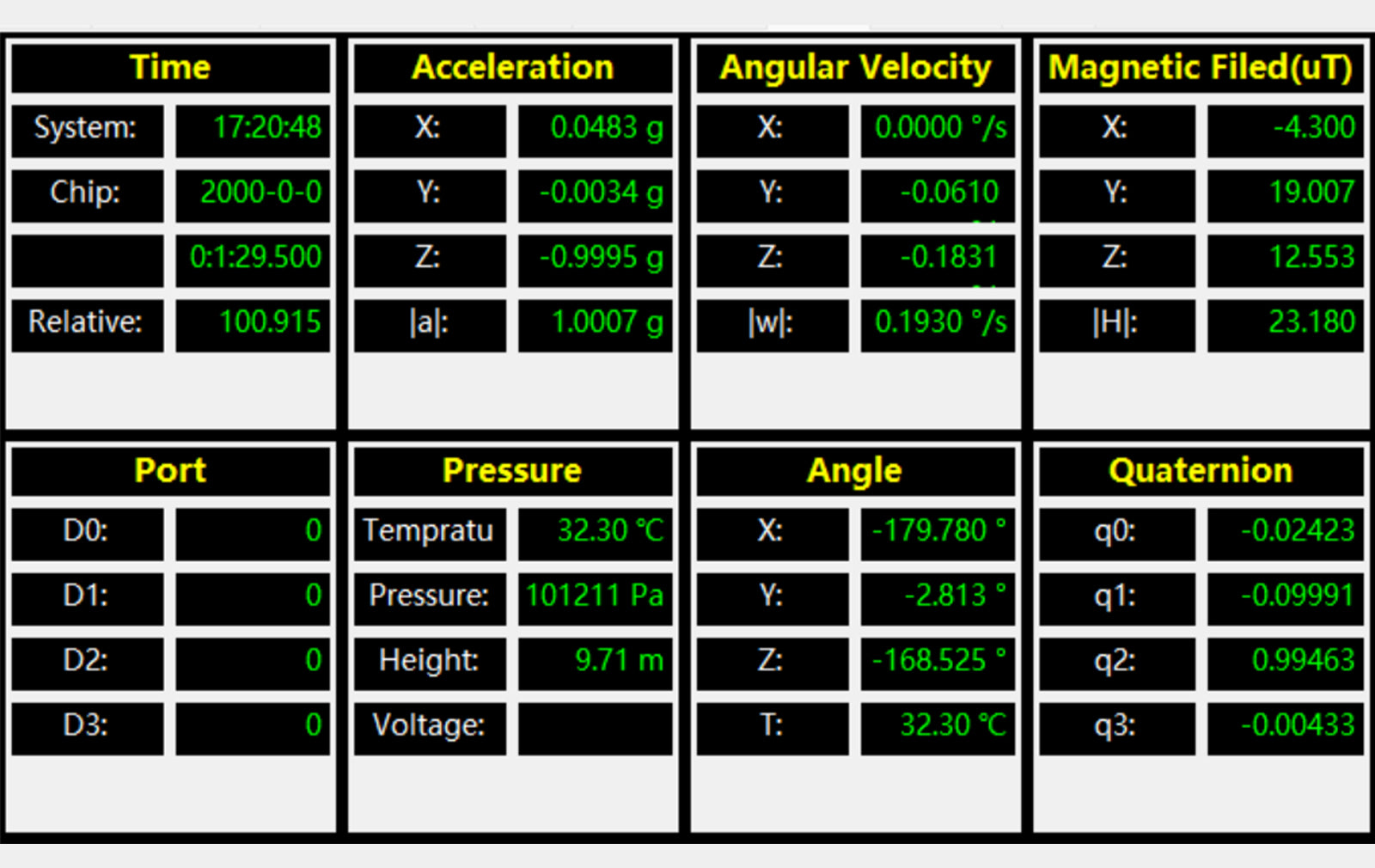
센서 원시 데이터 출력 주파수는 200 Hz입니다. 3 축 가속도계, 3 축 자이로스코프 및 3 축 자력계 데이터입니다. 융합 계산 내비게이션 데이터 출력 주파수 200Hz: 오일러 각도, 쿼터니언, 기압, 위치 (GNSS 결합), 속도.
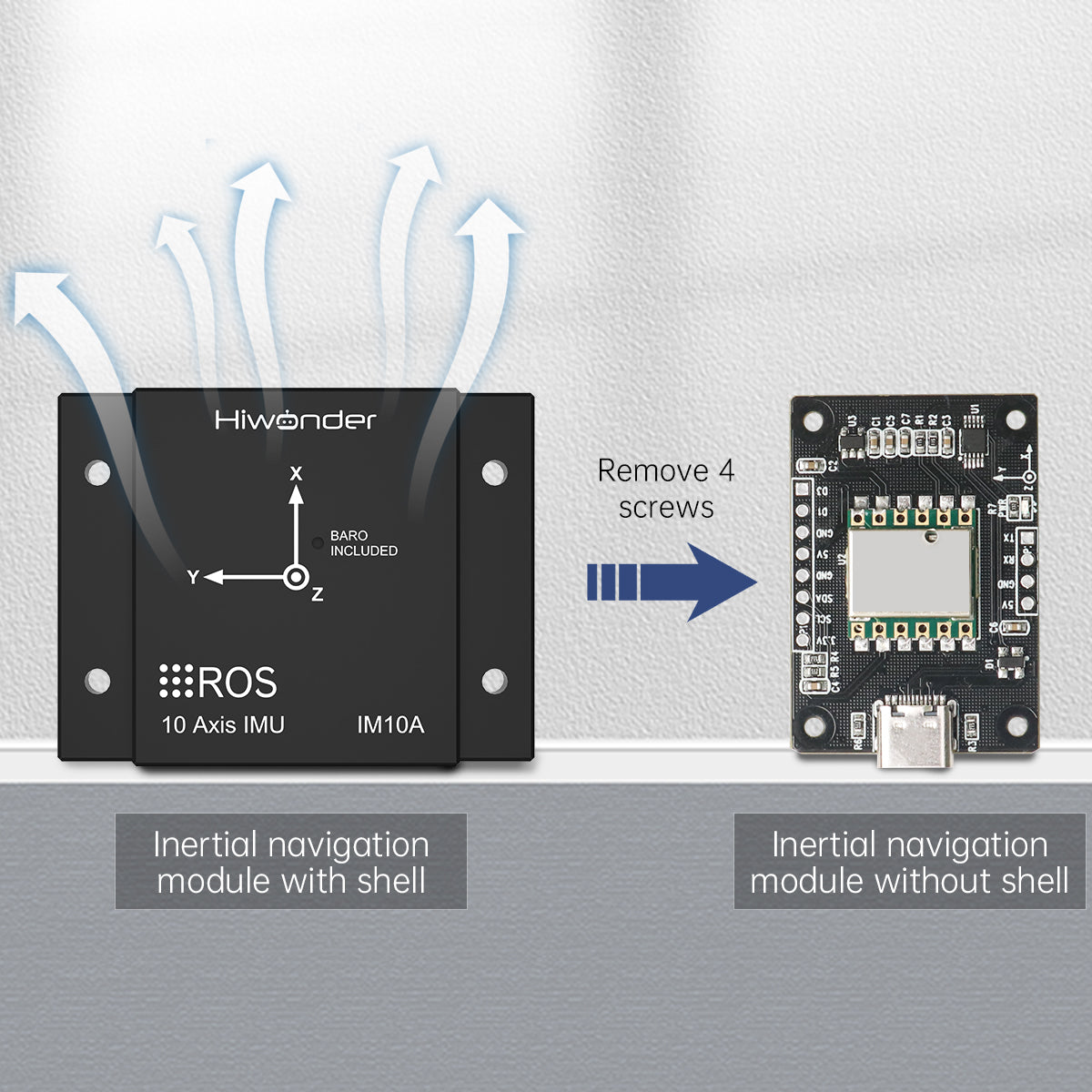
고정밀 CNC 금속 쉘은 우수한 방열 성능과 장기간의 안정적인 작동을 보장합니다. 금속 쉘은 쉽게 분해할 수 있으므로 TTL/I2C 핀을 통한 통신이 가능합니다.
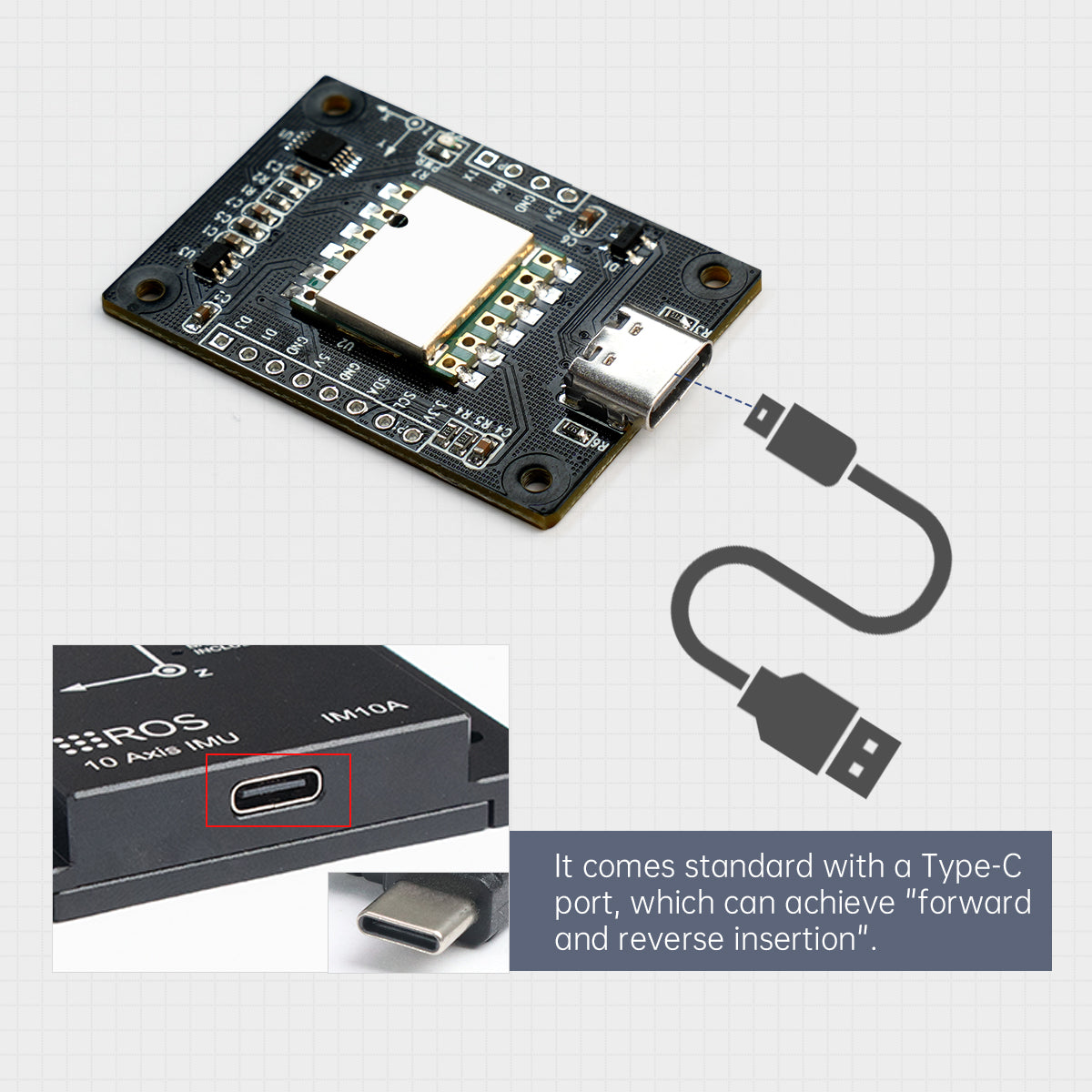
IM10A 모듈은 USB, UART 및 I2C 와 같은 여러 통신 방법을 지원하며 표준 TypeC 포트가 장착되어 있습니다.
기능
①안정각 출력, 요각: 0.5 RMS, 자세: 0.1 * RMS ②자이로스코프 자동 보정 기술 ③자이로 스코프 바이어스, 가속도 보정, 자력계 보정 ④통합 자세 해결사 ⑤직렬 포트 TTL, I2C 통신 포트 ⑥ 360 ° 안정적이고 지속적인 각도 출력 ⑦ 고도 측정을위한 내장 기압계 NMEA-0183 표준에 따라 직렬 GPS 데이터를 수신하여 GPS-IMU 네비게이션 통합 장치를 구축
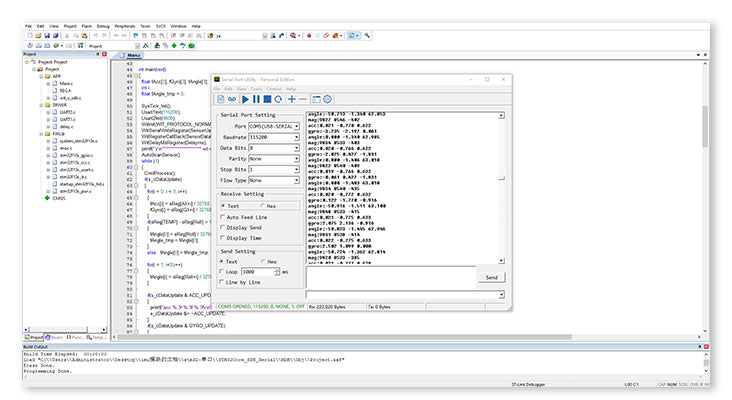
STM32 계산 루틴 제공
STM32 솔루션 데이터와의 연결 및 현재 IMU 데이터 및 자세 각도 표시를 지원합니다.
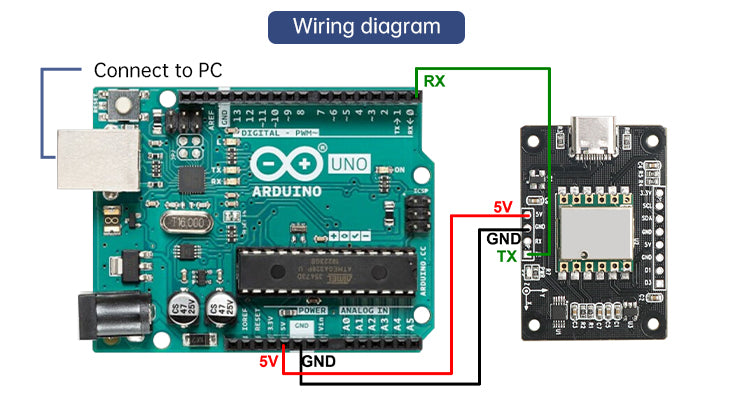
Arduino 계산 루틴 제공
9 축 원시 데이터, 각속도, 각도 및 기타 정보를 출력할 수 있습니다. 데이터는 직접
Arduino IDE의 직렬 포트 모니터를 통해 액세스 할 수 있으며 최소한의 배선으로 활용할 수 있습니다.
제품 특징
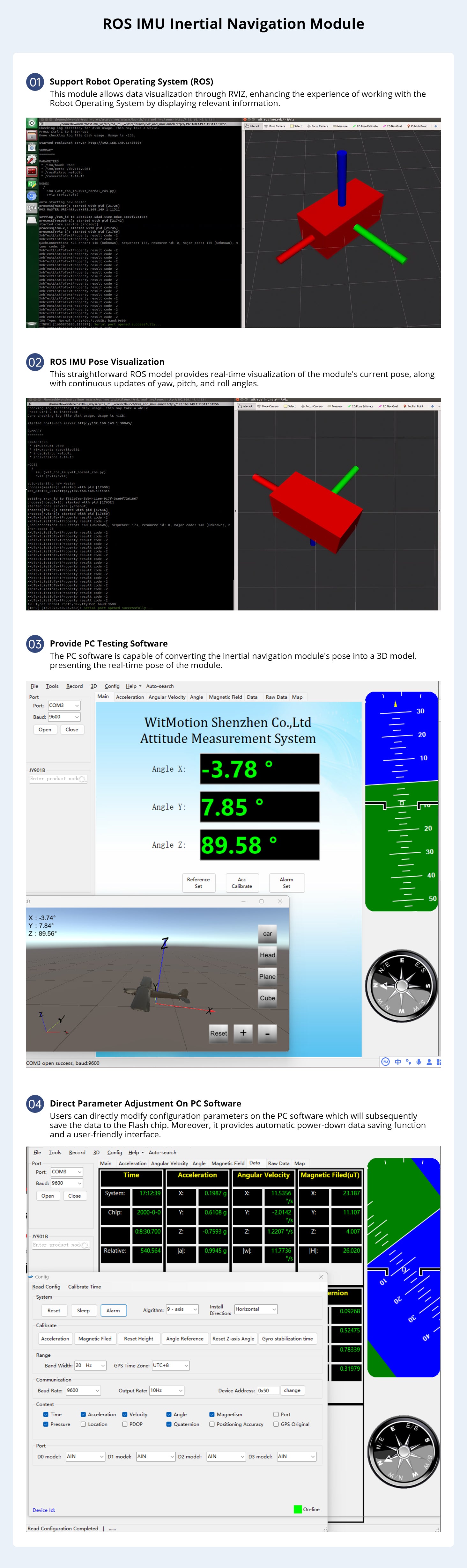
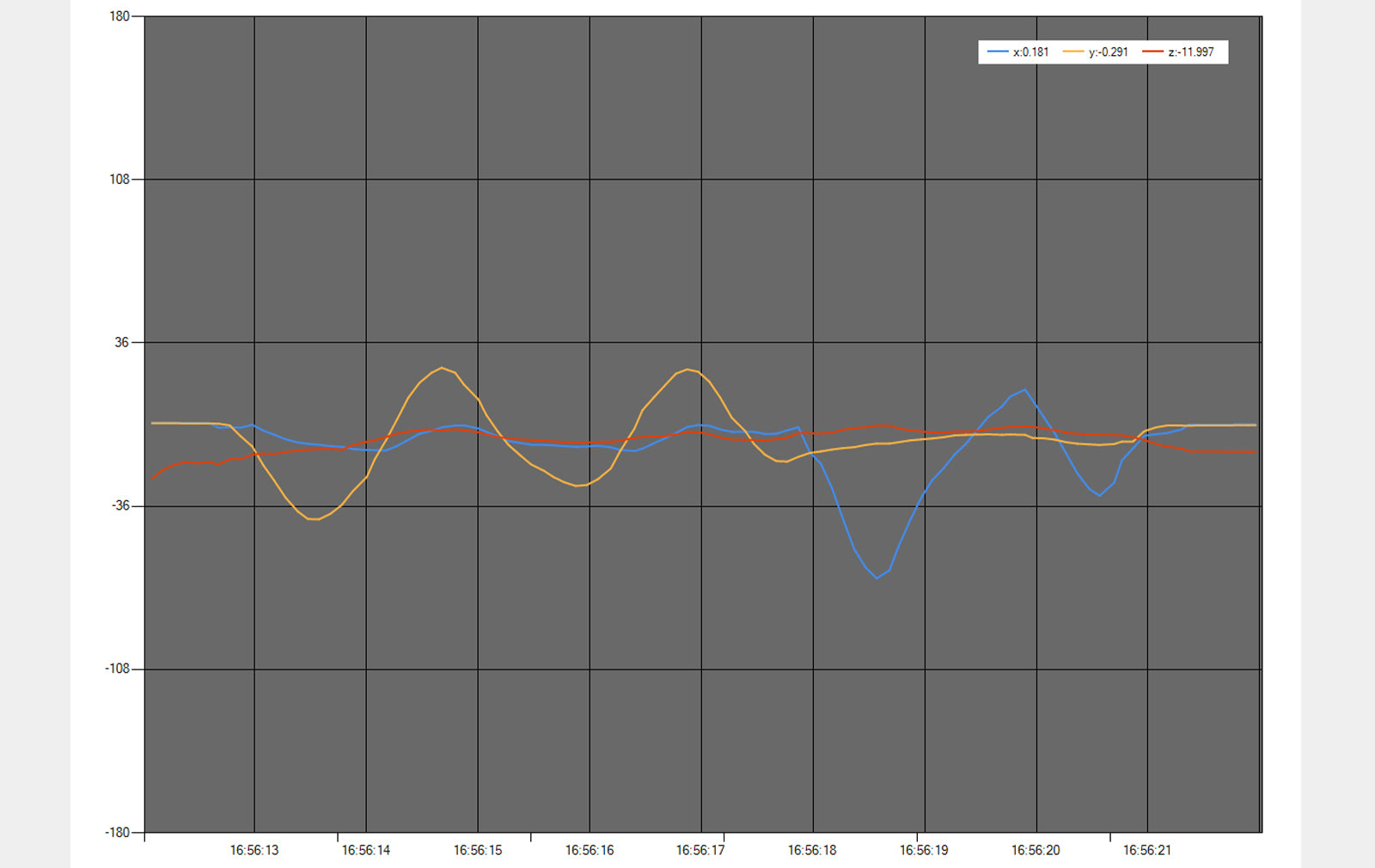
시각화된 데이터 그래프
모듈은 실시간으로 데이터를 업데이트하고, 그래픽으로 표시하고, 정보를 기록할 수 있습니다.
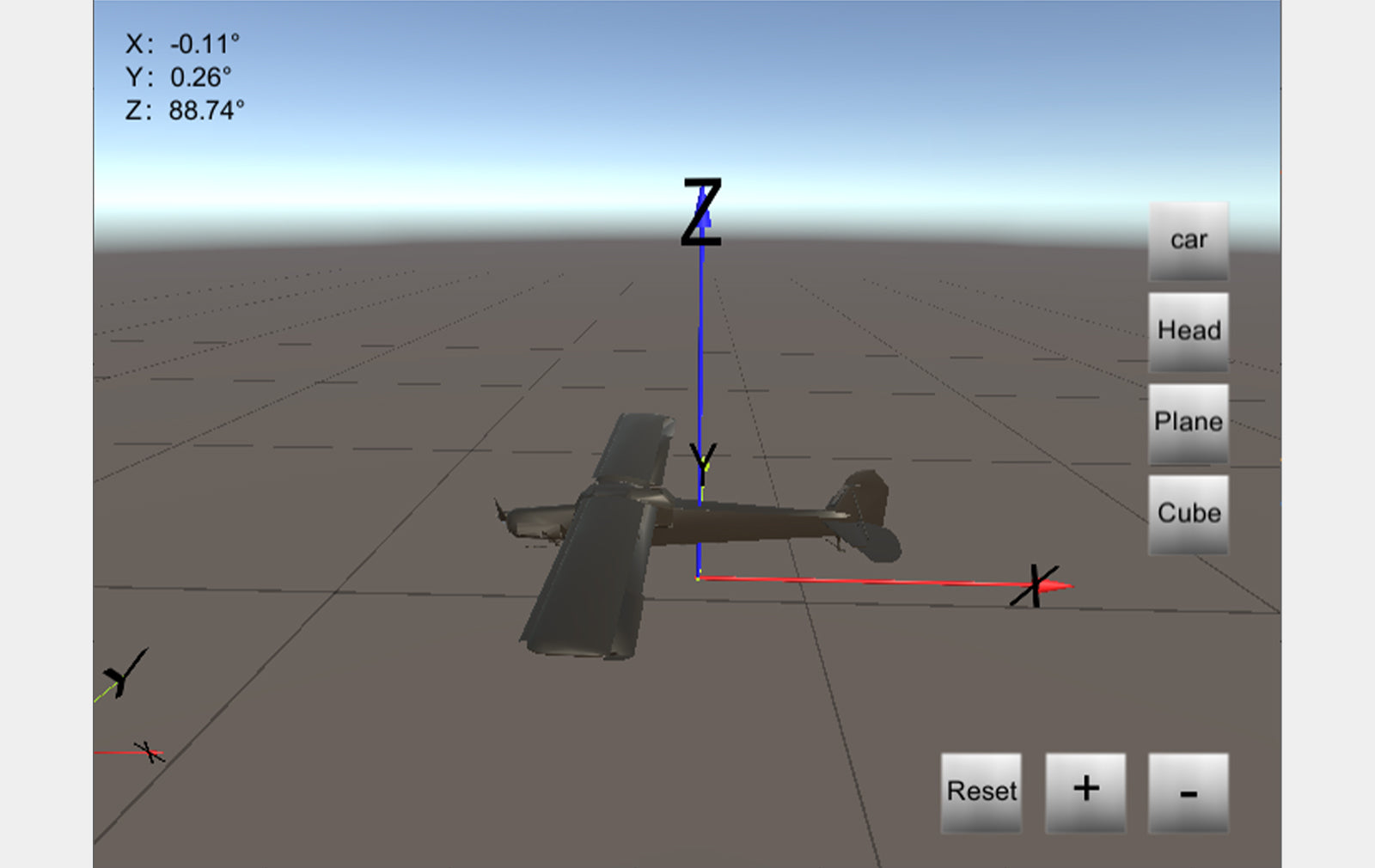
3D 모델 디스플레이
모듈은 3D 모델을 사용하여 현재 포즈를 나타낼 수 있습니다.
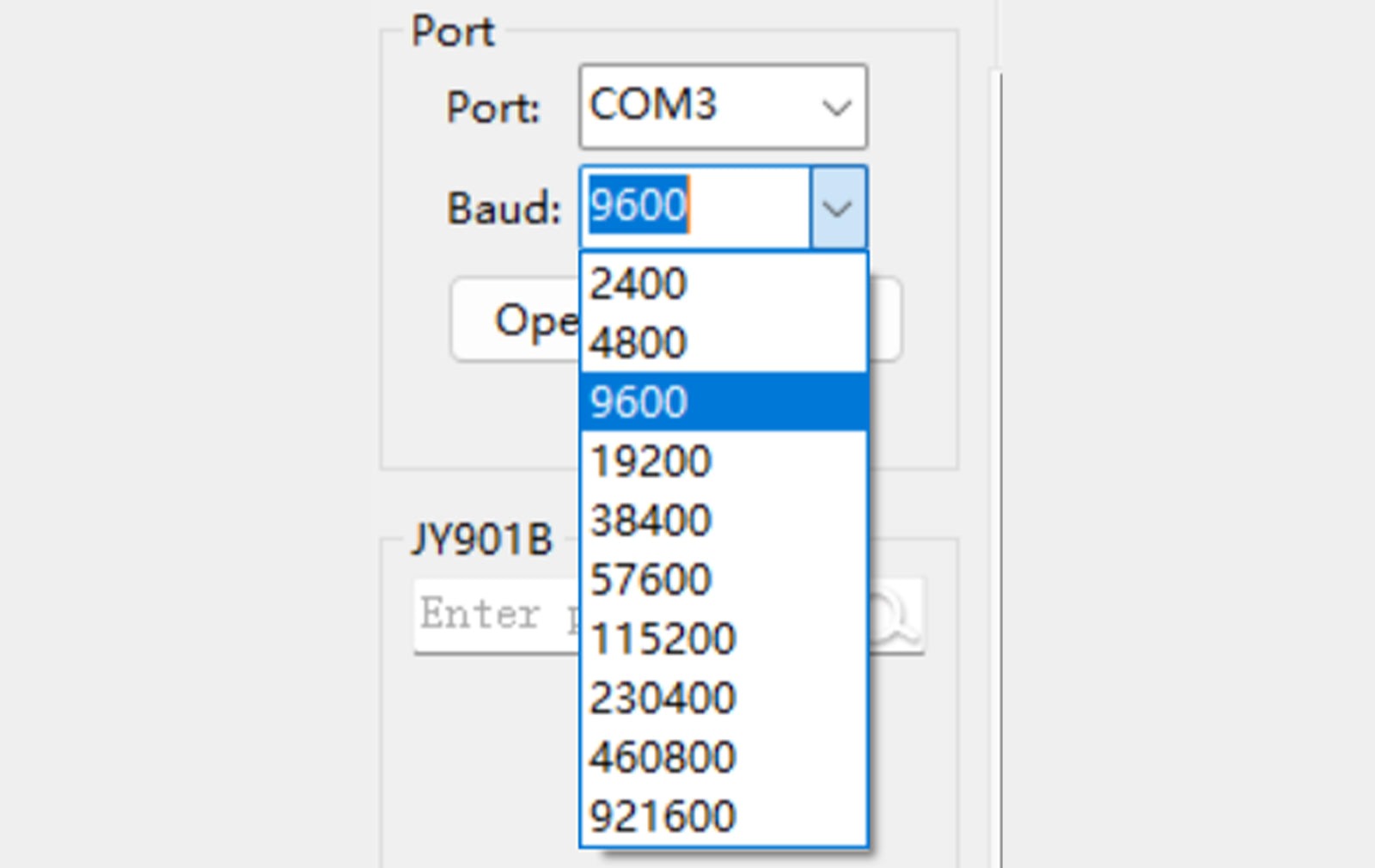
조정 가능한 전송 속도
초기 전송 속도는 9600 bps로 설정되지만 115200 bps, 921600 bps 또는 기타 사용자 지정 속도와 같은 대체 값으로 조정할 수 있습니다.
고정밀 관성 측정 장치
자이로 스코프, 가속도계, 자력계, 오일러 각도, 쿼터 니언 및 기타 정보에 대한 일관된 데이터를 제공 할 수 있습니다.
압력 및 높이 판독 용 기압계
모듈에는 대기압과 높이를 모두 측정 할 수있는 통합 기압계가 포함되어 있습니다.
반응 측정
민감한 반응, 안정적인 작동 및 정확한 측정을 제공 할 수 있습니다.
|
|
|
|
|























 배송기간
배송기간