|
|
     aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 토크: 1.5-15KGF.CM;According to the speed
- 사용법: 가전제품
- 모델 번호: JGA25-370 / 24GP-370B
- 출력 전력: 1W
- 연속 전류 (A): 6V 0.42A;12V 0.25A;24V 0.15A
- 특징을 보호하십시오: 물방울 방지
- 정류: 브러시
- 구조: 영구 자석
- 효율성: IE 1
- 유형: 기어 모터
- 브랜드 이름: FAR ALONG
- 근원: CN (정품)
- Product name: encoder gear motor
- Alias 1: encoder gear motor
- Alias 2: gear motor and encoder
- Alias 3: dc 12v encoder gear motor
- Alias 4: gear motor 12v encoder
- Alias 5: dc gear motor encoder
- Alias 6: planetary gear encoder
- Alias 7: planetary gearbox dc motor encoder
- Alias 8: mini gear motor encoder
- Alias 9: small gear motor with encoder
What is a DC planetary encoder geared motor?
The gearbox adopts planetary gearbox, planetary gear transmission has many unique advantages compared with ordinary gear transmission. It can realize reduction transmission with large transmission ratio, realize compact high-power transmission, and can also realize coaxial deceleration (speed increase), multiple sets of gears At the same time, it operates effectively, and the average force is uniform, thereby greatly improving the output torque and service life.
After the deceleration motor is installed with the Hall encoder, the speed can be measured accurately without losing pulses, and the running data can be recorded accurately. The A/B phase of the motor rotates one circle and outputs 11 pulses each. But if you are not a professional, please do not use this function.
This motor can choose two shaft diameters, 4mm and 6mm.
You can choose one of the shaft diameters, and the shaft type of the two will be slightly different.
The following is the dimension drawing of the motor with a shaft diameter of 4MM
Important reminder
Because we use different measuring tools, so the measurement data of the product size will be slightly different.
If your project has high requirements for the size of the motor, we recommend that you contact us before purchasing.Thank you very much!
We name the length of the gearbox L. Note that the length of the gearbox will vary with the speed of the motor. For details, please refer to the L length of the corresponding parameter in the following parameter table.
The length of the gearbox is about 20.5mm to 32.2mm. The length of the gearbox is different for different speeds, so please check the corresponding gearbox length in the parameter table according to the speed you choose.
The following is the dimension drawing of the motor with a shaft diameter of 6MM
Important reminder
Because we use different measuring tools, so the measurement data of the product size will be slightly different.
If your project has high requirements for the size of the motor, we recommend that you contact us before purchasing.Thank you very much!
We name the length of the gearbox L. Note that the length of the gearbox will vary with the speed of the motor. For details, please refer to the L length of the corresponding parameter in the following parameter table.
The length of the gearbox is about 20.5mm to 32.2mm. The length of the gearbox is different for different speeds, so please check the corresponding gearbox length in the parameter table according to the speed you choose.
The following introduces the meaning of parameter table ① to ⑩
① Input rated DC voltage
② No-load speed, the unit is RPM/MIN (The speed fluctuates up and down by 10%)
③ No-load current, unit is (A)
④ Rated load speed, the unit is RPM/MIN (The speed fluctuates up and down by 10%)
⑤ Rated load current, unit is (A)
⑥ Rated load torque, unit is kgf.cm. Your project load should not exceed rated load torque of the motor, otherwise the life of the motor will be reduced or motor burned.
⑦ Maximum limit load torque, unit is kgf.cm, please ignore this torque
⑧ Maximum limit load current, unit is (A), please ignore this current
⑨ Reduction ratio
⑩ "L" Gearbox length; The length of the gearbox is abbreviated as "L", and the unit of length is mm. This refers to the length of the gearbox corresponding to the parameter you selected. As we all know, the speed of the motor is different, the structure of the gear inside the gear box is different, so the length of the reduction box is different.
Important reminder, the length of the reducer is different, and the overall length of the motor is also different. After selecting the voltage and no-load speed of the motor, you need to check the corresponding length of the gearbox, and then you can refer to the dimension drawing above to get the total length of the motor.
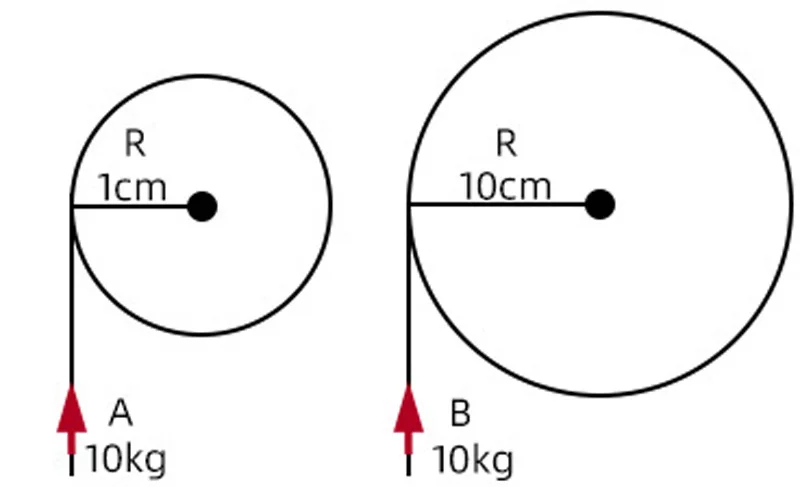
Refer to the diagram below to simply calculate the torque required for your project, which is the rated load torque of the motor you should choose.
The following are Figures A and B, respectively
The radius of Figure A is 1CM, which means that the radius of the object driven by the motor is 1CM, and the weight of the object is 10KG, then the motor torque you need to choose is 10KG.CM;
The radius of Figure B is 10CM, which means that the radius of the object driven by the motor is 10CM, and the weight of the object is 10KG, then the motor torque you need to choose is 100KG.CM;
Simply put, the load of your project needs to be inferred from the radius of the object, not just the weight of the object.
It is calculated as follows
Calculate the required torque = the radius of the driven object CM* times the weight of the object
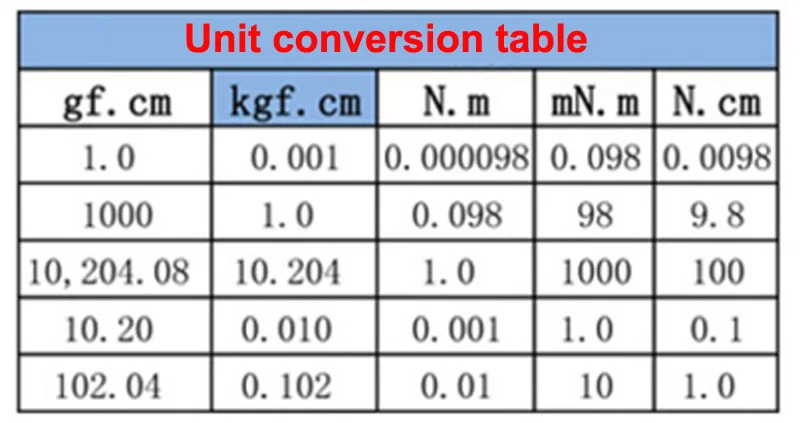
In order to make it easier for you to understand the conversion of the motor torque unit kgf.cm into other units, we have made the following unit conversion table.
The following introduces the basic information of this motor
(1) Name of the motor: DC Planetary Encoder Geared Motor
(2) Rated voltage : DC 6V , DC 12V And DC 24V
(3) No load speed have:
40 / 48 / 60 / 94 / 240 / 375 / 1200 RPM / Min
(4) About the rated load torque of the motor: the no-load speed of the motor is different, the torque will also be different, the lower the speed you choose this motor, the greater the torque of the motor;
In short, the slower the motor spins, the heavier the load it can drive, and the faster the motor spins, the lighter the load it can drive.
Some people will have a doubt. If the maximum speed of this motor is purchased, such as 1200rpm, if we reduce the speed of the motor from 1200rpm to 40rpm, when the motor is running at 40rpm, can the torque of the motor reach 15KG ?
This is impossible. When the speed of the motor is adjusted, the torque of the motor will also decrease as the speed decreases. For example, the speed of the motor you bought is 1200rpm, and the torque of the motor is 1.5KGF.CM . When you reduce the speed of the motor, the torque of the motor will be lower than 1.5KG. If the speed of the motor is greatly reduced, the torque of the motor will also be greatly reduced.
If you buy the lowest speed of this motor, such as 40rpm, the torque of the motor is 15KG, if you reduce the speed of the motor from 40rpm to 1rpm, the torque of the motor will also be lower than 15KG.
So you need to consider whether the final torque of the motor can reach the load of your project after the motor is decelerated. If not, you need to consider choosing other lower speeds or other motors.
You can contact us about the principle of torque change with speed, we can help you avoid buying mistakes, thanks!
(5) Direction of rotation of the motor: CW Or CCW ; Support Reversed
(6) Gear material: Metal gears make the motor last longer
(7) The speed of the motor can be adjusted using the speed controller. If you also need a speed controller, you can contact us and we will recommend the most suitable controller for you.
For example, the speed of the motor is 40rpm, you can adjust speed from 0rpm to 40rpm or 40rpm to 0rpm through the speed controller,that is, the speed you choose to buy is the adjustable range Maximum speed.
However, if you use a speed controller to control the rotation speed of the motor, the torque of the motor will decrease as the speed decreases. If the torque of the motor is lower than the load of your project, the motor will be damaged, you need to pay special attention.
(8) This motor is suitable for a variety of micro-automation equipment. As long as you confirm that the motor voltage and torque of your choice are suitable for the voltage and load of your project before purchase, there is no limit to the scope of use of this motor.
For example, Smart Robot ; Smart Door Lock ; DIY tank etc.
The following describes the wiring method of the motor
Red wire : connect the positive pole of the DC power supply.
Black line : The negative power supply required to connect the encoder 3.3V / 5V. (Note: the positive and negative poles cannot be connected incorrectly)
Yellow wire : signal feedback line; The motor rotates one turn and outputs 11 signals.
Green line : signal feedback line; The motor rotates one turn and outputs 11 signals.
Blue line : The positive pole of the power supply required to connect the encoder is 3.3V/5V. (Note: the positive and negative poles cannot be connected incorrectly)
White wire : Connect the negative pole of the DC power supply.
When the red and white wires are connected interchangeably, the direction of rotation of the motor will change.
The following is the basic information of the Hall encoder
- Type: AB dual-phase incremental magnetic ring Hall encoder
- Line speed: base pulse 11PPRxcl gear reduction ratio
- Supply voltage: DC3.3V/DC5.0V
- Type: Self-contained pull-up shaping resistor, directly connected to the microcontroller.
- Interface type: PH2.0 (standard cable)
- Output signal type: square wave AB phase
- Response frequency: 100KHz
- Number of basic pulses: 11PPR
- Number of magnetic ring trigger poles: 22 poles (11 pairs of poles)
The following is a description of the quality materials and structures of this motor.
① Gearbox outer wall
② The output shaft of the motor is available with a shaft diameter of 4mm and 6mm
③ Planetary gear, using thickened metal gear, high strength, reduce noise, make the motor run stably
④ Planetary gear frame
⑤ Connecting plate
⑥ DC brushed high-speed motor
⑦ Hall encoder
⑧ M2.5 screw holes
The following is the outline drawing of the motor
|
|
|
|
|
































 배송기간
배송기간