aHR0cDovL2ZyZWVzaGlwLmNvLmty
aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 브랜드 이름: uuustore
- 재료: 복합 재료
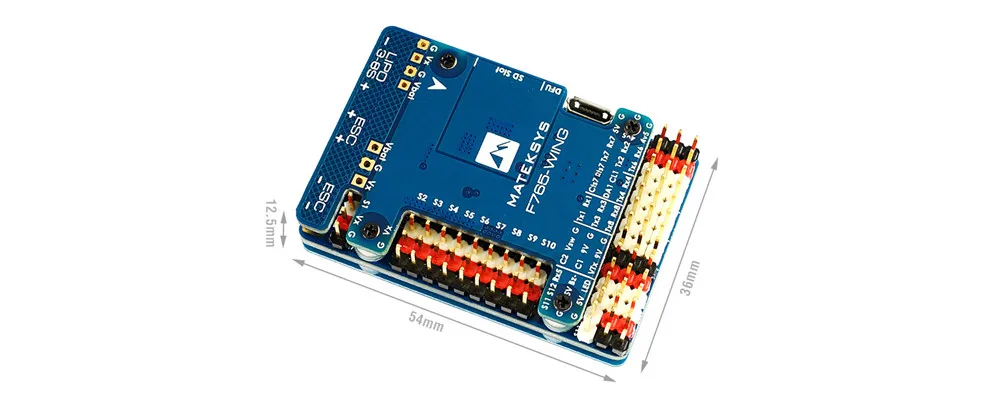
- 크기: 54 x 36 x 13 mm
- 공구 용품: 배터리
- 원격 제어 주변기기/장치: 원격 컨트롤러
- 사륜구동 특성: 조립식
- 기술 파라미터: 값 2
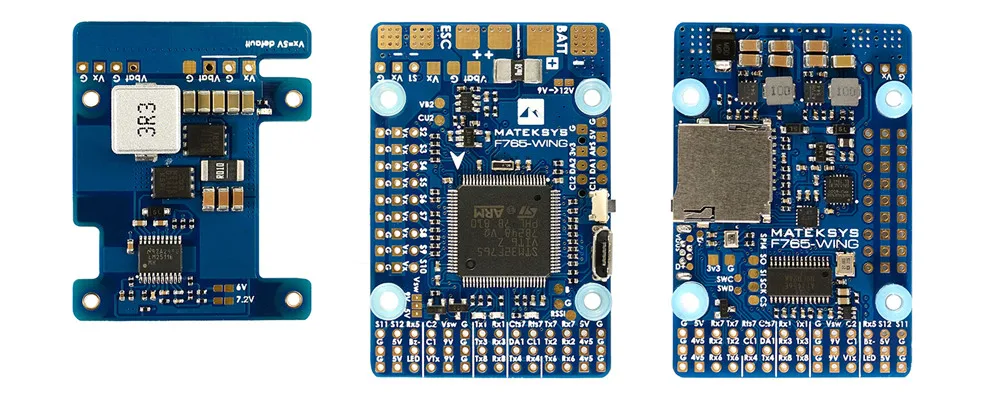
- 모델 번호: Matek Systems F765-WING
- 차량 유형: 비행기
- 업그레이드 부품/액세서리: 접합기
- 원격 제어 장남감 부품 및 악세사리: 속도 컨트롤러
- Weight: 26g
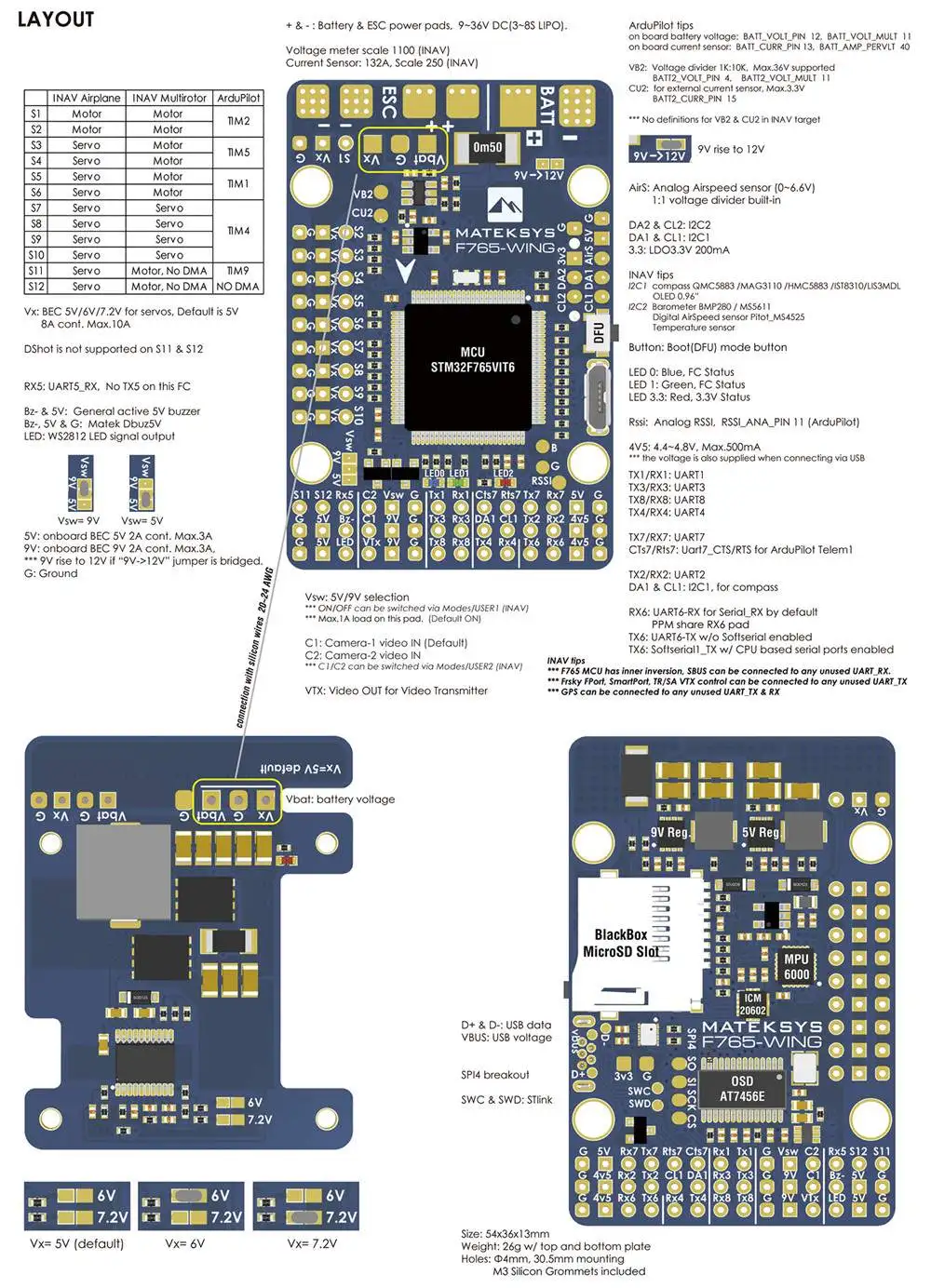
F.C 명세:
Mcu: stm32f765vit6, 216 mhz, 512kb ram, 2 mb 플래시
Imu: mpu6000 (spi1) & icm20602 (spi3)
Baro: bmp280 (i2c2)
Osd: at7456e (spi2)
Blackbox: microsd 카드 슬롯 (sdio)
내장 된 반전 기능이있는 7x uarts (1,2, 3,4, 6,7, 8).
1x softserial1_tx (inav)
12x pwm 출력 (s1 ~ s10 지원 dshot)
6x adc (vbat, 전류, rssi, 아날로그 속도, vb2, cu2)
F.c 상태 (파란색, 빨간색) 및 3.3 v 표시기 (빨간색) 용 3x led
2x I2C
1x SPI4 break'out
전환 듀얼 카메라 입력
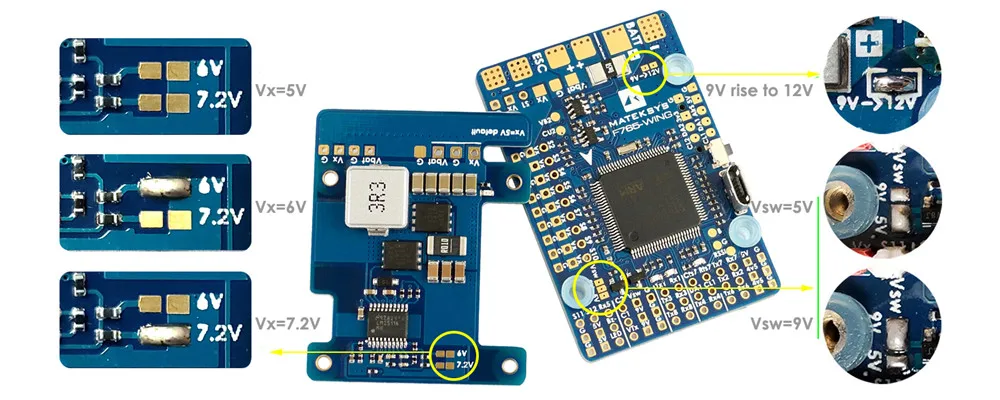
카메라/vtx 용 전환 가능한 5 v/9 v (12 v)
고정밀 전류 감지
Adc vb2 전압 분배기: 1 k: 10 k
Adc 속도 전압 분배기: 10 k: 10 k
Tr/sa vtx 제어: 예
Ws2812 led 스트립: 예
비퍼: 예
RSSI: 예
아날로그 속도 센서: 예
디지털 속도 센서: 예
F.C 펌웨어:
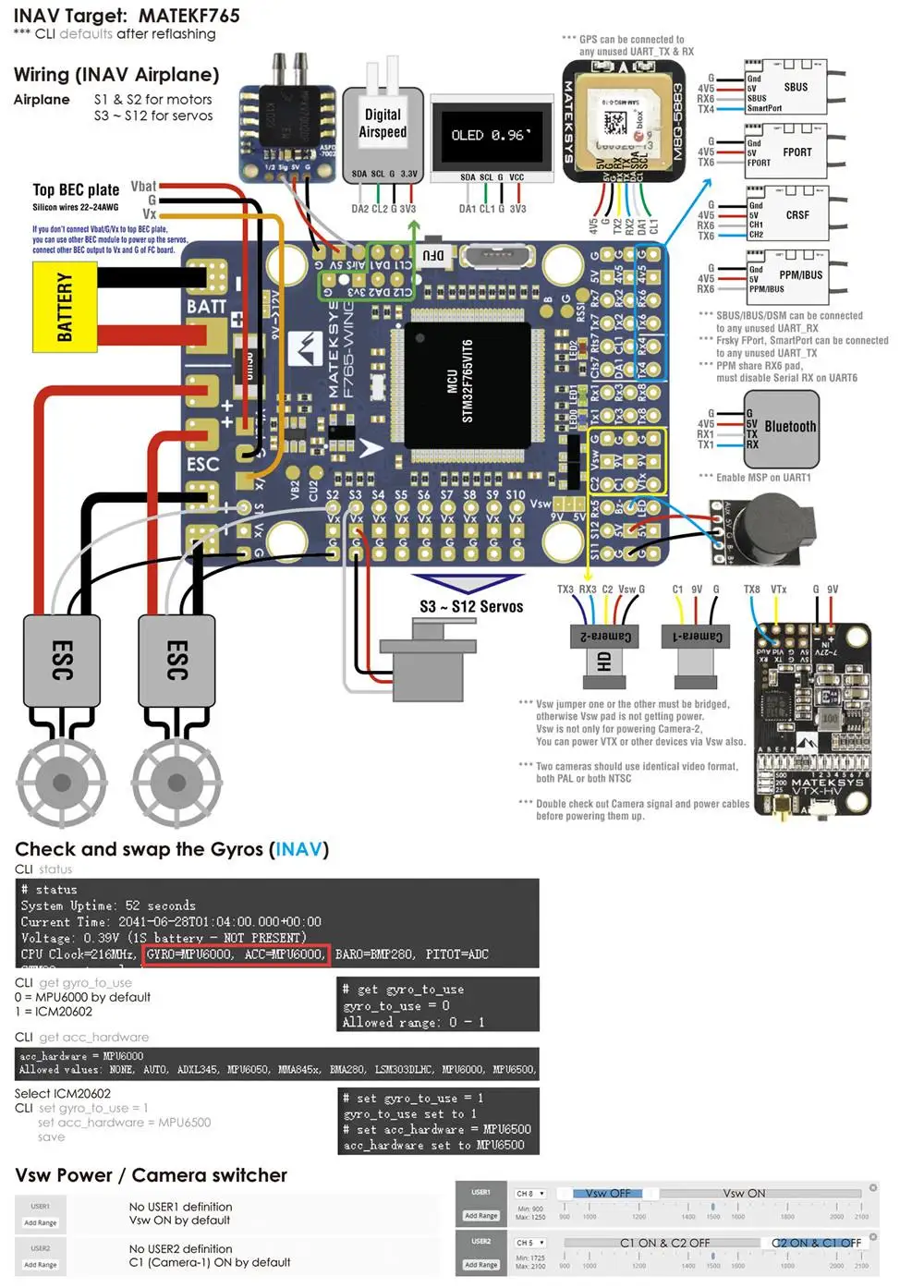
INAV 대상: MATEKF765
Ardupilot (chibios) 표적: MATEKF765-WING
PDB:
입력 전압: 텔레비젼 보호를 가진 9 ~ 36 v (3 ~ 6 s lipo)
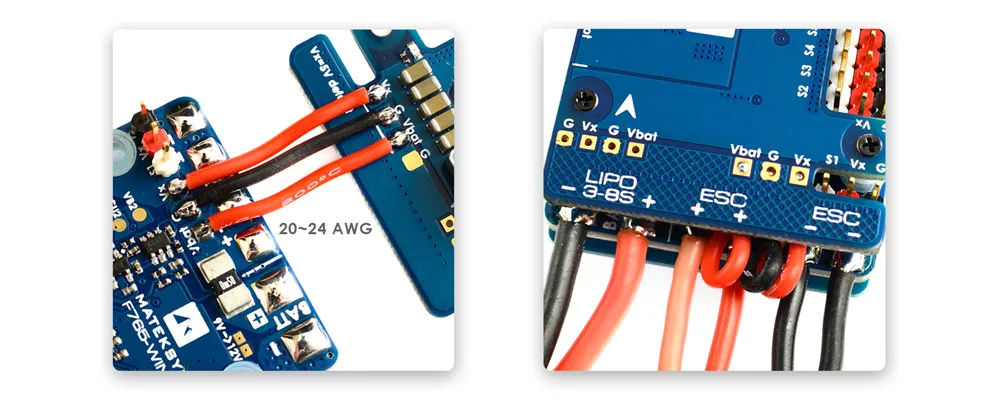
2x ESC 패드
배터리 전압 센서: 1:10 (1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
전류 senor: 132a, 3.3 v adc (inav, ardupilot 40 a/v의 스케일 250)
출력 bec 5 v:
비행 컨트롤러, 수신기, osd, 카메라, 버저, 2812 led_strip, 부저, gps 모듈, 속도 용으로 설계되었습니다.
지속적인 현재: 2 amps, max.3a
출력 bec 9 v/12 v:
비디오 송신기, 카메라, 짐벌 요법 용으로 설계되었습니다.
지속적인 현재: 2 amps, max.3a
점퍼 패드가있는 12 v 옵션
BEC Vx 출력:
설계되었습니다 서보
전압 조정, 5 v 기본값, 점퍼를 통해 6 v 또는 7.2 v
지속 현재: 8 Amps, Max.10A
출력 bec 3.3 v:
Baro/com. pass 모듈 및 spek. trum rx 용으로 설계되었습니다.
선형 레귤레이터
지속 현재: 200mA
신체:
설치: 30.5x30.5mm, grommets Φ3mm와 Φ4mm
차원: 54x36x13mm
무게: 26g
패키지 포함:
1 x matek 시스템 F765-WING stm32f765vi 비행 컨트롤러 rc 비행기 고정 날개 용 osd 내장


















 배송기간
배송기간